




Citar (formato IEEE):
Microlab IoT, «Sensor de fuerza FSR 406 con Arduino,» microlab.ec. https://microlab.ec/blog/sensor-de-fuerza-fsr-406-con-arduino (accessed: Feb. 6, 2023).
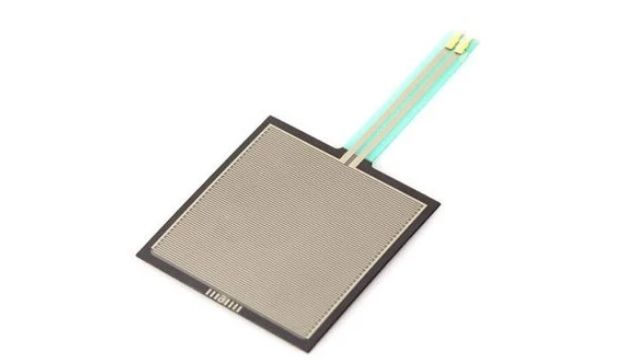
La línea de sensores FSR UX 406 puede detectar y medir la presión de 0.5N En esencia, los resistores de detección de fuerza son dispositivos que producen una disminución en la resistencia eléctrica a medida que se les aplica más fuerza física o presión, lo que los coloca en la categoría más amplia de dispositivos piezorresistivos. La construcción típica consiste en un sustrato flexible similar a una membrana que está impreso con un patrón de circuito interdigitado. Cuando no se aplica presión, el circuito permanece abierto y la electricidad no puede pasar de un cable a otro. A continuación, se fija un espaciador a este sustrato para separarlo mediante un pequeño espacio de aire del segundo sustrato, que está revestido con una tinta conductora. Cuando se aplica fuerza al dispositivo, el sustrato conductor se presiona contra el sustrato del circuito impreso, lo que permite que la electricidad fluya de un cable al otro. La cantidad de electricidad que puede fluir dentro del circuito depende de la presión ejercida sobre el FSR, ya que una mayor presión pone más material conductor en contacto con los cables y aumenta la salida eléctrica de una manera predecible, lo que les permite también detectar cambios en la fuerza.
La línea de sensores FSR UX 406 puede detectar y medir la presión de 0.5N a 150N mientras opera solo o como parte de una matriz. El sensor robusto de dos cables puede soportar millones de actuaciones y operar en entornos hostiles y desordenados y bajo temperaturas extremas, lo que lo convierte en una excelente opción para aplicaciones industriales, médicas, automotrices o de IoT. El FSR UX 406 se presenta en una configuración cuadrada con un área activa de 34 mm2 y se conecta mediante pestañas de soldadura
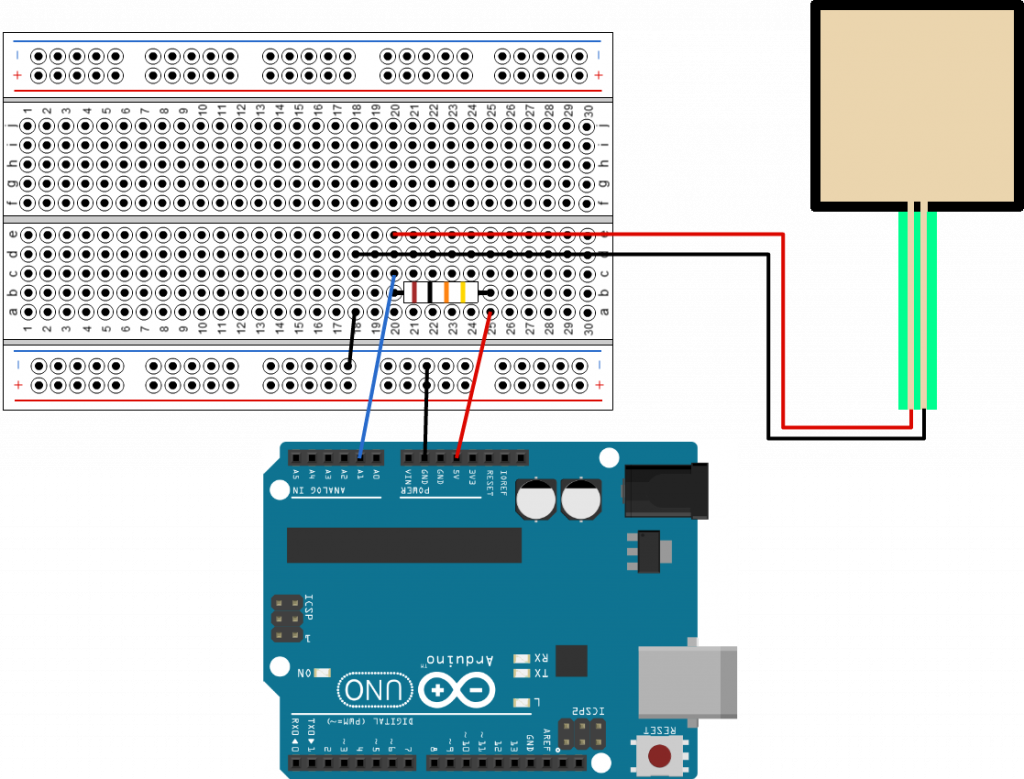
Diagrama de conexión
Relaciones resistencia-voltaje-fuerza
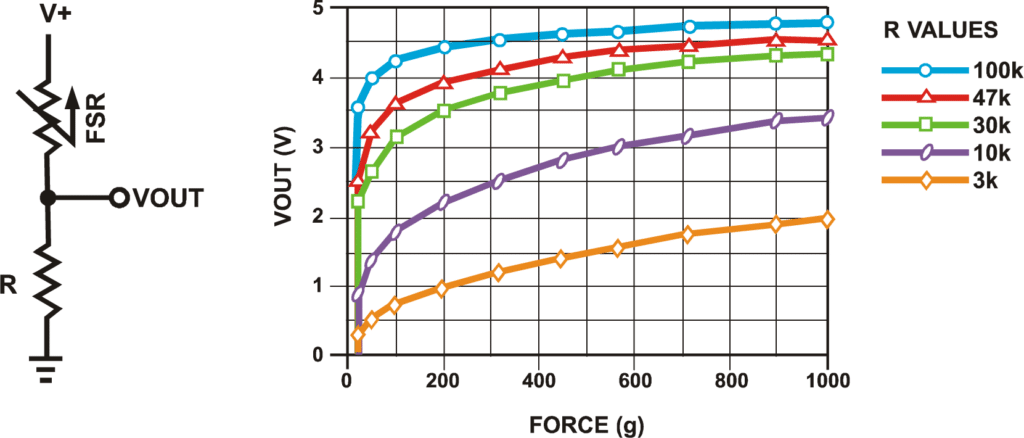
Vout = Vcc x R / (R + Rfsr)
Código de ejemplo
int pin_lectura = A1;
int valor;
int voltaje;
void setup() {
Serial.begin(9600);
}
void loop() {
valor = analogRead(pin_lectura);
Serial.print("Entrada analógica = ");
Serial.println(valor);
voltaje = map(valor, 0, 1023, 0, 5000);
Serial.print("Voltaje en mV = ");
Serial.println(voltaje);
delay(1000);
}Si necesitas asesoría en proyectos de Arduino, Raspberry, electrónica, estamos localizados en la ciudad de Quito Ecuador. Somos Microlab.


Hola, estos sensores hasta cuanta fuerza de presion pueden medir. Busco algo enfocado en medir fuerza para daptarlo a un golpe de una patada de taekwondo
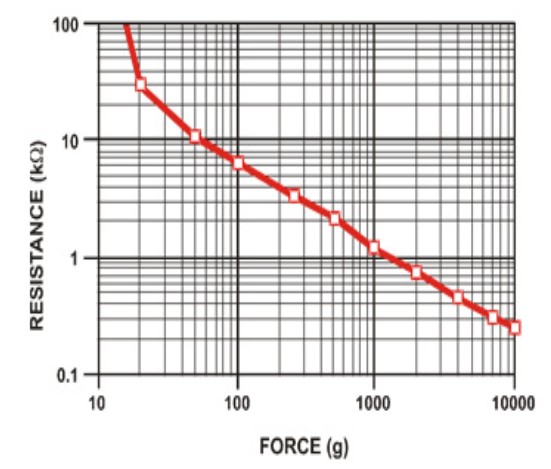
Hola. Según los gráficos, la relación entre la resistencia y la fuerza aplicada no es lineal, lo que significa que el sensor tiene una sensibilidad mayor a fuerzas ligeras, pero se vuelve menos preciso a medida que la fuerza aumenta.
Los gráficos muestran cómo la resistencia disminuye significativamente con fuerzas pequeñas, mientras que para fuerzas más grandes, el cambio en resistencia es menos pronunciado. Esto indica que el sensor es más adecuado para detectar variaciones de presión en un rango limitado, idealmente entre 0.2 N y 20 N.
Dado que los golpes de taekwondo generan fuerzas mucho mayores (que pueden superar los 1000 N), el FSR 406 no es apropiado para medir con precisión ese tipo de impacto. Este tipo de sensor está diseñado para aplicaciones de baja a mediana fuerza, donde la exactitud en medir pequeñas variaciones es crucial. Por lo tanto, para medir el impacto de una patada de taekwondo, sería más recomendable usar sensores que puedan manejar fuerzas superiores y que tengan una respuesta más lineal y precisa en esos rangos, como celdas de carga o sensores piezoeléctricos.
hola Luis tal vez avanzaste algo? ya que yo estoy en el mismo proyecto y estoy sacando las señales del sensor tanto resistivo como inductivo